목표 : 화면전환시 깜빡이는 현상을 방지한다.
핵심개념 :
- 깜빡거리는 것은 두 장면 사이에 다른 관련없는 불필요한 장면이 순간적으로 끼어든다는 뜻이다.
- 화면을 그리는 시간을 단축할수록, '미완성 장면'이 보여지는 시간을 줄여 전체적으로 깔끔한 전환이 된다.
이론 :
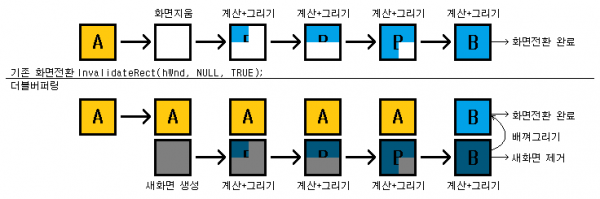
위 그림의 기존화면전환쪽 흰색부분이 깜빡임의 원인입니다.
더블버퍼링은 나중에 완성된 장면을 한꺼번에 출력시켜 두 장면 사이에 불필요한 장면이 없도록 합니다.
기존화면을 InvalidateRect(hWnd, NULL, FALSE); 로 전환할 경우, 이전 화면을 지우지 않아 일단 깜빡임은 없을겁니만,
화면을 그리는 과정이 눈에 보일 수 있습니다. 특히 그림이 곂쳐지는 부분에선 깜빡임이 발생할 수도 있겠죠.
단순한 프로그램에서는 더블버퍼링을 쓰던 말던 실행속도가 빨라 화면전환에 별 문제는 없으나,
게임처럼 CPU 사용량이 좀 있는 프로그램을 제작할때는 거의 필수적으로 더블버퍼링을 쓰셔야 유저가 편할 겁니다.
예제소스 :
#include <windows.h>
#include <stdio.h> // sprintf_s 관련
char Str[32]; // 그냥 문자열 선언
RECT crt; // 직사각형모양 범위 선언
// 더블버퍼링은 보통 타이머 등과 같이 연동해서 씁니다.
// 여기 예제에서는 순수하게 더블버퍼링과 관련된 것만 코딩하려고 노력하였기에
// 실행시 기존화면출력과 별로 구별되어 보이지 않는 것이 정상입니다.
LRESULT CALLBACK WndProc( HWND hWnd, UINT iMessage, WPARAM wParam, LPARAM lParam )
{
HDC hdc, hMemDC; // HDC를 하나더 선언해준다. HDC는 '그리는 작업' 이다.
HBITMAP hBitmap, OldBitmap; // HBITMAP은 대략 종이를 의미한다. 종이 2장 선언
PAINTSTRUCT ps;
switch( iMessage ) {
case WM_CREATE:
GetClientRect(hWnd, &crt); // 시작할때 현재 창 범위를 crt 에 기억한다.
return 0;
case WM_PAINT: // 페인트 이벤트 → InvalidateRect(hWnd, NULL, FALSE); 로 호출
hdc = BeginPaint(hWnd,&ps); // 그리기 시작
hMemDC = CreateCompatibleDC(hdc); // hMemDC 에 기존 DC (hdc)에 맞게 새 DC 생성
hBitmap = CreateCompatibleBitmap(hdc, crt.right, crt.bottom); // crt 규격대로 종이 생성
OldBitmap = (HBITMAP)SelectObject(hMemDC, hBitmap); // 종이 교체
// 새 DC 생성하면 그에 딸린 펜, 붓, 종이 같은 것들도 기본값으로 다 셋팅되는데,
// 셋팅된 종이가 가로세로 0 x 0 인 종이라 crt 규격인 종이로 글씨체 설정하듯 교체해주어야 하는 것 같음.
// 아니면 말고. 그냥 추측이니까.... 틀린 것일 수도 있음. 난 컴공대생이 아니라 아마추어일 뿐이라고.
// 이부분에 그린다. 주의할 점은 hdc 대신 hMemDC 로 설정해서 그려야 한다는 것.
sprintf_s(Str,"더블 버퍼링"); TextOutA(hMemDC,10,10,Str,lstrlenA(Str));
sprintf_s(Str,"화면 전환시 깜빡임 방지"); TextOutA(hMemDC,10,30,Str,lstrlenA(Str));
BitBlt(hdc, 0, 0, crt.right, crt.bottom, hMemDC, 0, 0, SRCCOPY); // 배껴그리기
// hdc 의 0,0 위치에 hMemDC의 0,0위치부터 crt.right,crt.bottom까지의 영역, 즉 crt범위를 그린다 라는 설정인듯.
DeleteObject(SelectObject(hMemDC, OldBitmap)); // 종이 원래대로 한 후 제거
DeleteDC(hMemDC); // hMemDC 제거
EndPaint(hWnd,&ps); // 그리기 종료
return 0;
case WM_DESTROY:
PostQuitMessage( 0 );
return 0;
}
return DefWindowProc( hWnd, iMessage, wParam, lParam );
}
int APIENTRY WinMain( HINSTANCE hInstance, HINSTANCE hPrevInstance, LPSTR lpszCmdParam, int nCmdShow )
{ ...(생략. http://cafe.naver.com/buildgame/71 참조)... }
출처 : http://cafe.naver.com/buildgame.cafe?iframe_url=/ArticleRead.nhn%3Farticleid=94&


 ARM_Reference-rE.Ejected.pdf
ARM_Reference-rE.Ejected.pdf
 LEAVE COMMENT
LEAVE COMMENT
